
1. Introduction
Tesla is not just a car company—it’s a technology powerhouse revolutionizing the world with its advancements in artificial intelligence (AI) and machine learning (ML). From autonomous driving to energy optimization, Tesla’s ML-driven innovations are reshaping industries. If you’re a software engineer aspiring to join Tesla’s elite team of ML engineers, you’re in for an exciting yet challenging journey.
Tesla’s ML interviews are known for their rigor. They test not only your technical expertise but also your ability to apply ML concepts to real-world problems like self-driving cars, robotics, and energy systems. To help you prepare, we’ve compiled the top 25 frequently asked questions in Tesla ML interviews, complete with detailed answers and practical insights.
At InterviewNode, we specialize in helping software engineers like you ace ML interviews at top companies like Tesla. Whether you’re brushing up on fundamentals or diving deep into advanced topics, this guide is your one-stop resource. Let’s get started!
2. What to Expect in a Tesla ML Interview
Before diving into the questions, let’s understand what Tesla’s ML interview process looks like. Here’s a breakdown:
Technical Screening: A phone or video interview focusing on ML fundamentals, coding, and problem-solving.
Coding Rounds: Hands-on coding challenges, often involving Python, data manipulation, and algorithm design.
ML Design Interviews: System design questions tailored to ML applications, such as designing a perception system for autonomous vehicles.
Behavioral Interviews: Questions about your past experiences, teamwork, and alignment with Tesla’s mission.
Tesla looks for candidates with:
Strong fundamentals in ML, deep learning, and computer vision.
Practical experience with real-world datasets and edge computing.
A passion for solving complex problems in autonomous driving, robotics, and energy systems.
Now, let’s dive into the top 25 questions you’re likely to face in a Tesla ML interview.
3. Top 25 Frequently Asked Questions in Tesla ML Interviews
Section 1: Foundational ML Concepts
1. What is the bias-variance tradeoff, and how do you manage it in ML models?
Answer:The bias-variance tradeoff is a fundamental concept in ML that deals with the balance between underfitting and overfitting.
Bias refers to errors due to overly simplistic assumptions in the learning algorithm. High bias can cause underfitting, where the model fails to capture the underlying patterns in the data.
Variance refers to errors due to the model’s sensitivity to small fluctuations in the training set. High variance can cause overfitting, where the model captures noise instead of the underlying pattern.
How to Manage It:
Reduce Bias: Use more complex models, add features, or reduce regularization.
Reduce Variance: Use simpler models, increase training data, or apply regularization techniques like L1/L2 regularization.
Cross-Validation: Use techniques like k-fold cross-validation to find the right balance.
Tesla Context: In autonomous driving, managing bias and variance is crucial. For example, a model with high bias might fail to detect pedestrians, while a model with high variance might mistake shadows for obstacles.
2. Explain the difference between supervised, unsupervised, and reinforcement learning.
Answer:
Supervised Learning: The model learns from labeled data, where each input has a corresponding output. Example: Predicting the steering angle based on camera images.
Unsupervised Learning: The model learns patterns from unlabeled data. Example: Clustering similar driving scenarios.
Reinforcement Learning (RL): The model learns by interacting with an environment and receiving rewards or penalties. Example: Training a self-driving car to navigate a road.
Tesla Context: Tesla uses supervised learning for object detection, unsupervised learning for anomaly detection in sensor data, and RL for optimizing driving policies.
3. How do you handle overfitting in a machine learning model?
Answer:Overfitting occurs when a model performs well on training data but poorly on unseen data. Here’s how to handle it:
Regularization: Add penalties for large weights (e.g., L1/L2 regularization).
Cross-Validation: Use techniques like k-fold cross-validation to evaluate model performance.
Early Stopping: Stop training when validation performance stops improving.
Data Augmentation: Increase the diversity of training data (e.g., flipping images).
Tesla Context: Overfitting in autonomous driving can be dangerous. For example, a model overfitted to sunny weather might fail in rain or snow.
4. What is cross-validation, and why is it important?
Answer:Cross-validation is a technique to evaluate a model’s performance by splitting the data into multiple subsets. The most common method is k-fold cross-validation, where the data is divided into k subsets, and the model is trained k times, each time using a different subset as the validation set.
Why It’s Important:
It provides a more accurate estimate of model performance.
It helps detect overfitting by testing the model on unseen data.
Tesla Context: Cross-validation ensures that Tesla’s ML models generalize well to diverse driving conditions.
5. Explain the working of gradient descent and its variants (SGD, Adam, etc.).
Answer:Gradient descent is an optimization algorithm used to minimize the loss function in ML models.
Gradient Descent: Updates model parameters in the direction of the negative gradient of the loss function.
Stochastic Gradient Descent (SGD): Updates parameters using a single data point at a time, making it faster but noisier.
Adam: Combines the benefits of SGD with momentum and adaptive learning rates for faster convergence.
Tesla Context: Tesla uses advanced optimization techniques like Adam to train deep neural networks for real-time decision-making in autonomous vehicles.
Section 2: Deep Learning and Neural Networks
6. How do convolutional neural networks (CNNs) work, and why are they used in computer vision?
Answer:CNNs are a type of neural network designed to process grid-like data, such as images. They consist of:
Convolutional Layers: Apply filters to detect features like edges and textures.
Pooling Layers: Reduce spatial dimensions while retaining important features.
Fully Connected Layers: Combine features to make predictions.
Why CNNs?
They automatically learn spatial hierarchies of features.
They are computationally efficient due to parameter sharing.
Tesla Context: CNNs are used in Tesla’s Autopilot system for tasks like lane detection and object recognition.
7. Explain backpropagation and how it helps in training neural networks.
Answer:Backpropagation is the process of calculating gradients of the loss function with respect to each weight in the network. It involves:
Forward pass: Compute the output and loss.
Backward pass: Compute gradients using the chain rule.
Update weights using gradient descent.
Why It’s Important:
It enables efficient training of deep neural networks.
It allows the network to learn from errors.
Tesla Context: Backpropagation is used to train Tesla’s deep learning models for tasks like path planning and obstacle avoidance.
8. What are activation functions, and why is ReLU preferred in most cases?
Answer:Activation functions introduce non-linearity into neural networks, enabling them to learn complex patterns.
ReLU (Rectified Linear Unit): Defined as f(x) = max(0, x). It’s preferred because:
It’s computationally efficient.
It mitigates the vanishing gradient problem.
Tesla Context: ReLU is widely used in Tesla’s neural networks for tasks like image classification and regression.
9. How do you handle vanishing and exploding gradients in deep learning?
Answer:
Vanishing Gradients: Gradients become too small, slowing down learning. Solutions:
Use activation functions like ReLU.
Use weight initialization techniques like Xavier initialization.
Exploding Gradients: Gradients become too large, causing instability. Solutions:
Use gradient clipping.
Normalize input data.
Tesla Context: Handling these issues is critical for training deep networks in Tesla’s Autopilot system.
10. What is transfer learning, and how is it applied in Tesla’s autonomous driving systems?
Answer:Transfer learning involves using a pre-trained model on a new, related task. For example:
Use a CNN trained on ImageNet for object detection in autonomous driving.
Tesla Context: Transfer learning allows Tesla to leverage existing models and adapt them to specific tasks like pedestrian detection or traffic sign recognition.
Section 3: Computer Vision and Autonomous Driving
11. How does Tesla use computer vision for object detection and lane tracking?
Answer:Tesla’s Autopilot system uses computer vision to:
Detect objects like cars, pedestrians, and cyclists using CNNs.
Track lanes using semantic segmentation and edge detection.
Key Techniques:
YOLO (You Only Look Once): For real-time object detection.
Hough Transform: For lane detection.
12. Explain the concept of semantic segmentation and its applications in self-driving cars.
Answer:Semantic segmentation involves classifying each pixel in an image into a category (e.g., road, car, pedestrian). It’s used in self-driving cars for:
Understanding the driving environment.
Planning safe paths.
Tesla Context: Tesla uses semantic segmentation to differentiate between drivable areas and obstacles.
13. What is the difference between object detection and instance segmentation?
Answer:
Object Detection: Identifies objects in an image and draws bounding boxes around them. Example: Detecting a car in an image.
Instance Segmentation: Goes a step further by identifying objects and delineating their exact shapes (pixel-level segmentation). Example: Outlining the exact shape of a car.
Tesla Context: Tesla uses instance segmentation for precise localization of objects, which is critical for safe navigation.
14. How do you evaluate the performance of a computer vision model?
Answer:Common evaluation metrics include:
Precision and Recall: Measure the model’s accuracy and completeness in detecting objects.
mAP (Mean Average Precision): Combines precision and recall for object detection tasks.
IoU (Intersection over Union): Measures the overlap between predicted and ground-truth bounding boxes.
Tesla Context: Tesla uses these metrics to ensure its vision models are reliable and accurate in real-world driving scenarios.
15. What are the challenges of working with real-time video data in autonomous vehicles?
Answer:Challenges include:
Latency: Models must process data in real-time to make instant decisions.
Data Volume: Handling massive amounts of video data from multiple cameras.
Environmental Variability: Adapting to different lighting, weather, and road conditions.
Tesla Context: Tesla’s Autopilot system is designed to handle these challenges using optimized neural networks and edge computing.
Section 4: Reinforcement Learning and Robotics
16. What is reinforcement learning, and how is it used in Tesla’s robotics projects?
Answer:Reinforcement learning (RL) is a type of ML where an agent learns by interacting with an environment and receiving rewards or penalties. Tesla uses RL for:
Training autonomous driving policies.
Optimizing energy usage in Tesla vehicles.
Example: An RL agent learns to navigate a road by receiving rewards for safe driving and penalties for collisions.
17. Explain the concept of Q-learning and how it differs from policy gradient methods.
Answer:
Q-Learning: A model-free RL algorithm that learns the value of actions (Q-values) in a given state. It uses a Q-table to store state-action values.
Policy Gradient Methods: Directly optimize the policy (strategy) by adjusting parameters to maximize rewards.
Difference: Q-learning is value-based, while policy gradient methods are policy-based.
Tesla Context: Tesla uses both approaches to train its autonomous driving systems.
18. How do you handle exploration vs. exploitation in reinforcement learning?
Answer:
Exploration: The agent tries new actions to discover their effects.
Exploitation: The agent uses known actions to maximize rewards.
Balancing Act: Techniques like ε-greedy (choosing random actions with probability ε) or Thompson sampling are used to balance exploration and exploitation.
Tesla Context: Balancing exploration and exploitation is crucial for training safe and efficient driving policies.
19. What are the key challenges in applying RL to real-world robotics?
Answer:Challenges include:
Sim-to-Real Gap: Differences between simulated and real-world environments.
Safety: Ensuring the robot doesn’t cause harm during exploration.
Scalability: Handling high-dimensional state and action spaces.
Tesla Context: Tesla uses advanced simulators to bridge the sim-to-real gap and ensure safe RL training.
20. How does Tesla simulate environments for training RL models?
Answer:Tesla uses high-fidelity simulators that replicate real-world driving conditions, including:
Traffic scenarios.
Weather conditions.
Pedestrian behavior.
These simulators allow Tesla to train RL models safely and efficiently before deploying them in real vehicles.
Section 5: Practical ML and Coding
21. Write a Python function to implement k-means clustering from scratch.
Answer:
22. How would you optimize a machine learning model for inference on edge devices?
Answer:
Model Quantization: Reduce precision of weights (e.g., from 32-bit to 8-bit).
Pruning: Remove less important neurons or weights.
Knowledge Distillation: Train a smaller model to mimic a larger one.
Hardware Acceleration: Use specialized hardware like GPUs or TPUs.
Tesla Context: Tesla optimizes its models for inference on its in-car AI chips.
23. Explain how you would preprocess sensor data for an ML model in autonomous driving.
Answer:Steps include:
Normalization: Scale sensor data to a standard range.
Noise Filtering: Remove noise using techniques like Kalman filters.
Feature Extraction: Extract relevant features (e.g., speed, acceleration).
Data Augmentation: Simulate different driving conditions.
24. How do you handle missing data in a dataset?
Answer:
Imputation: Fill missing values using mean, median, or regression.
Deletion: Remove rows or columns with missing data.
Prediction: Use ML models to predict missing values.
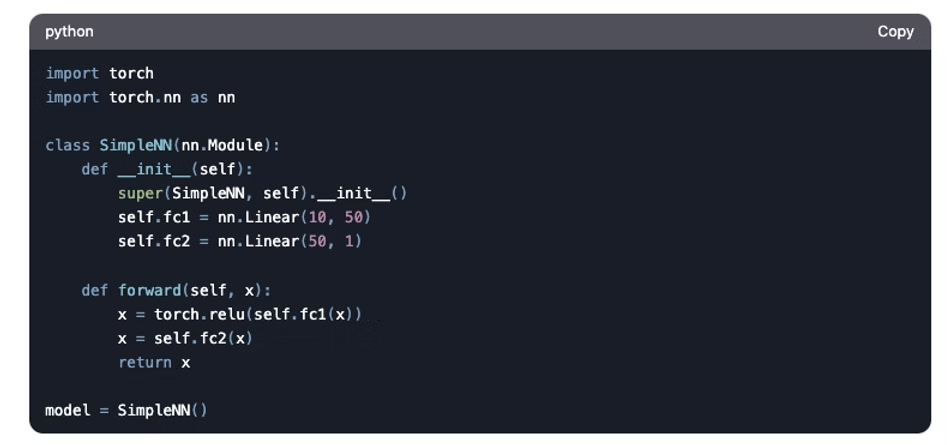
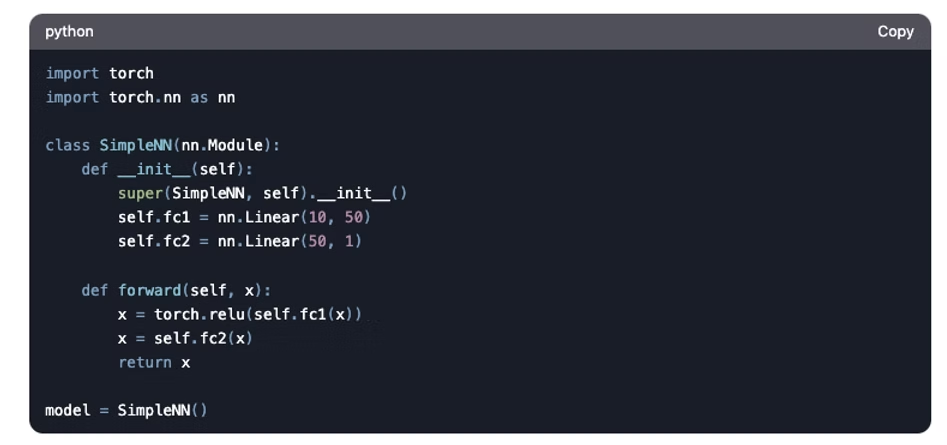
25. Write a TensorFlow/PyTorch implementation for a simple neural network.
Answer (PyTorch):
4. Tips to Ace Tesla’s ML Interview
Master the Basics: Be thorough with ML fundamentals, algorithms, and math.
Practice Coding: Solve problems on platforms like LeetCode and Kaggle.
Understand Tesla’s Projects: Research Tesla’s Autopilot, energy systems, and robotics.
Prepare for Behavioral Questions: Highlight teamwork, problem-solving, and passion for Tesla’s mission.
5. Conclusion
Preparing for Tesla’s ML interviews can be challenging, but with the right resources and practice, you can crack it. Use this guide to master the top 25 questions and boost your confidence. And remember, InterviewNode is here to help you every step of the way with personalized coaching, mock interviews, and expert guidance.
Ready to take the next step? Sign up for InterviewNode’s ML interview preparation program today and start your journey toward landing your dream job at Tesla!





